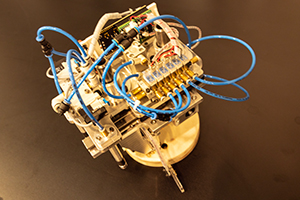
Résumé du cahier des charges: construire un module autonome capable de saisir des objets et de les déposer dans des logements, à l’image des « shapes boxes », ces boîtes dans lesquelles les petits enfants doivent déposer des objets de différentes formes dans les trous correspondants.
Vainqueur: CarJack.ingAymen Lagha, Brian Hochreutener, Maël Cuche, Daniel De Assunção et Alice Delaloye
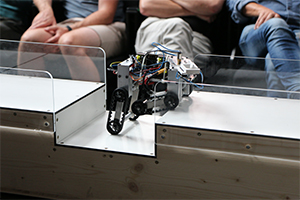
Les robots franchisseurs
jeudi 05 Sep 2019
Résumé du cahier des charges: construire un module autonome capable de franchir un fossé, d’aller chercher une bille et de la ramener dans un logement situé près du point de départ.
Vainqueur: Charlotte Héron
Julien Joret, Evelyne Brunner et Simon Ruetsch
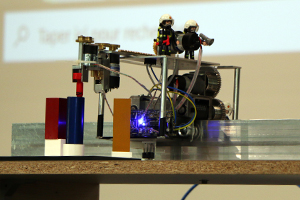
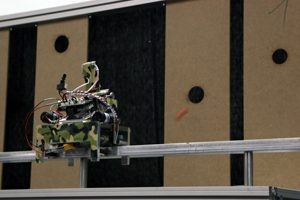
Les robots tireurs
jeudi 06 Sep 2018
Résumé du cahier des charges: construire un module autonome capable de se déplacer horizontalement le long d’un rail de 200 cm et de lancer quatre billes dans quatre trous percés dans une paroi verticale située à 60 cm du rail.
Vainqueur: Quattro Pistoletto
Vincent Donzé, Claudia Berger et Félicien Zaugg
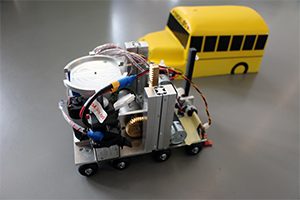
Les robots garçons de café
jeudi 07 Sep 2017
Résumé du cahier des charges: construire un module autonome capable de monter un escalier en bois le plus vite possible et sans faire tomber les neuf billes en acier posées sur un plateau à trous embarqué.
Vainqueur: Endelos
Gianni Musio, Julien Blaser et Florian Allemann
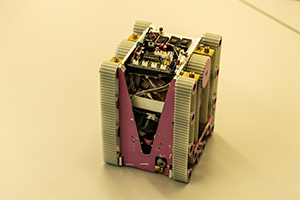
Les robots escaladeurs
jeudi 08 Sep 2016
Résumé du cahier des charges: construire un module autonome capable d’escalader le plus vite possible une paroi verticale aimantée de 2 mètres de haut. Une face de la paroi est lisse, l’autre percée de trous disposés régulièrement.
Vainqueur: DoraHook Climber
Nathan Cerveny, Jérémy Schumacher, Zhihao Zhang et Savanne Kham (manque sur la photo)
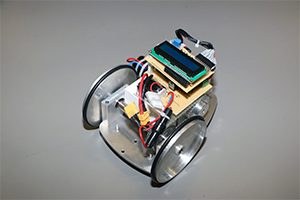
Les robots sans roues ni chenilles ni turbine
vendredi 04 Sep 2015
Résumé du cahier des charges: construire un module autonome capable de franchir le plus vite possible – sans roues ni chenilles ni turbine – une piste plane dénuée d’obstacles.
Vainqueur: Le Chaînial
Bastian Juillerat, Sébastien Rossé et Jérôme Stuber
Les robots basketteurs
vendredi 05 Sep 2014
Résumé du cahier des charges: construire un module autonome capable de grimper le long de deux cordes parallèles puis d’aller mettre une bille dans un gobelet situé à une hauteur de 2,5 mètres.
Vainqueur: Tyrobot
Marco Pavone, Mirko Gilliard, Adam Djela et Jérémie Toedtli (manque sur la photo)
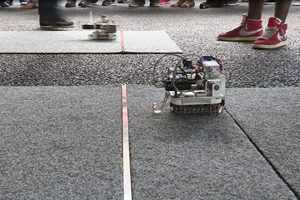
Les robots biathlètes
vendredi 06 Sep 2013
Résumé du cahier des charges: construire un module autonome capable de se déplacer le plus vite possible le long d’une barre horizontale de 3 mètres en marquant cinq cibles au passage.
Vainqueur: Buzz Lightyear
Stefan Iselin, Arnaud Robert, Cédric Vuilleumier et Rayan Aebi (manque sur la photo)
Les robots élévateurs
vendredi 07 Sep 2012
Construire un module autonome capable d’élever une masse de 100 g le plus haut possible, de l’y maintenir 10 secondes et de se replier dans sa configuration initiale.
Vainqueur: Z-Box
Thomas Toedtli et Dimitri Fostinis (Florian Tschäppät manque sur la photo)
Les robots freineurs
vendredi 09 Sep 2011
Résumé du cahier des charges: construire un module autonome capable de franchir le plus vite possible un parcours formé d’une pente ascendante de 35 degrés, d’une rampe horizontale et d’une pente descendante de 35 degrés, puis de s’arrêter dans la partie inférieure de cette dernière.
Vainqueur: La Schwytzoise
David Burkhalter, Sophie Lachat, Ludovic Neuenschwander et Estébane Marquis